公司名称:哈尔滨市爱思电子有限公司 公司地址: 哈尔滨市道里区爱建上海街6号海上银座A栋5层 电话/传真:0451-51181676
产品名称:Nao人形机器人
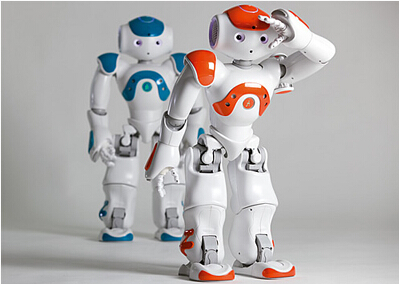
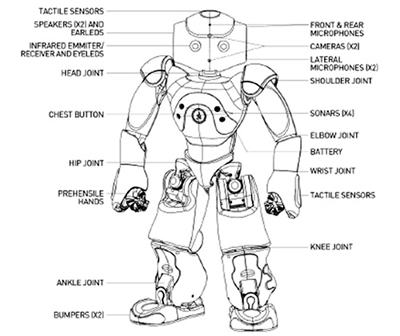
NAO机器人是Aldebaran Robotics公司研制的一款人工智能机器人。它拥有着讨人喜欢的外形,并具备有一定程度的人工智能和约一定程度的情感智商并能够和人亲切的互动。 Nao是在学术领域******范围内运用***广泛的类人机器人。Aldebaran Robotics公司将Nao的技术开放给所有的高等教育项目,并于2010年成立基金会支持在机器人及其应用领域的教学项目。 Nao机器人Nao的多用途是基于它可以通过现成的指令块进行可视化编程,因此它允许用户探索各种领域、运用各种复杂程度的编程程序并达到用户想要体验的各种不同效果。 教学用机器人通常是有趣、有挑战性和能激发想象力的。Nao作为教与学的得力助手,正在创造着未来的教育方式。 超过700个Nao已经被全球30个国家的200间******高校和实验室购买作为研究工具。正在使用Nao的高校机构有美国哈佛大学和布朗大学、英国威尔士大学、德国弗莱堡大学、日本东京大学、中国浙江大学和同济大学。高校不仅将Nao运用在机器人研究,人工智能和计算机科学领域,还运用在社会学和医疗保健领域。Nao参与的研究项目包括自闭症******、多智能体系统、自动化、讯号处理、全身运动以及路径规划。 Nao硬件采用******科技设计制造,保证了Nao动作的流畅性,还配备了多种传感器。此外,Nao可在Linux、Windows或Mac OS等操作系统下编程,并随机提供完整的软件和使用说明书。 此外,NAO机器人可以在多种平台上编程并且拥有一个开放式的变成构架,所以不同的软件模块可以更好的相互作用,不论使用者的专业水平如何,都能够通过图像编程平台来为NAO机器人编制程。 机械结构设计 1、机体规格与材料:身高约 58 cm,重约 4.3 kg, 机体材料为工程塑料。 2、充电器为AC 90-230 V/DC 24 V,电池能量持续时间约 90 min 3、需要具有25个自由度(DOF): 其中头部2个DOF,手臂5个DOF (每只手臂),胯部1个DOF,腿部5个DOF (每条腿),手部1个DOF;有三个手爪(每只手)。 4、2个扬声器,4个扩音器,2个CMOS数码摄像头,8个脚底压力传感器(每只脚各四个),1个双轴陀螺仪、1个三轴加速器,2个碰撞器(每只脚各一个)、双通道超声波传感器,2个红外传感器,9个触觉传感器; 5、Network access 连接类型为Wi-fi (IEEE 802.11g),以太网,通过胸前的按钮可以获得机器人的无限网络地址。 6、致动器基于霍尔效果传感器(32个)、dsPICS 微控制器和MAXON空芯杯直流电机 7、控制器主板采用1.6 GHz Intel Atom; RAM: 1GB / 闪存: 2GB 8、操作系统:嵌入式 Linux (32 bit x86 ELF), 使用OpenEmbedded基础上加以适当调整的发行套件,编程语言:Choregraphe, C++, URBI, Python。 9、随机配备Bluetooth;学术(科研)版。 10、基础功能:拥有人脸识别能力、动态图像追踪能力、中文英文语言识别能力、传感器的数据采集功能、电机运动控制功能。 主处理器介绍(头部) 头部分布有四个同步麦克风(48 KHz, 16 bits) 2个扩音器:头部两边各1个(48Khz, 16 bits) 2个VGA Cmos 摄像头,频率达30FPS 身体结构介绍 1、电机 25 个电机, 达1.2 N.m 21 个Maxon 无芯电机 2、位置传感器: 36 个磁性旋转编码器 (分辨率:12 bits) 每个腿部关节 2 个传感器:1 个motor axis, 1 关节 3、每个关节都有电流传感器 4、20 个嵌入式微控制器: 18个DSPic 40MIPS / 16 Bits 1个ARM9 96MHz 1个Psoc 传感器介绍 包括红外测距、超声波探测、碰撞传感器、压力感测传感器、陀螺仪、重力加速度等100多个传感器。 图像处理系统介绍 两个CMOS摄像头,分辨率为640*480;快速可上下切换的摄像头使NAO能够看到自己的脚 语音处理系统介绍 机器人有四个麦克风,分布在前后左右,可以完成声音定位。同时会说23个国家的语言。 机器人特殊领域应用案例 1、导盲机器人、导聋机器人 2、自闭症******机器人 3、其他应用领域 物联网及智能家居领域应用 复杂环境路径探测和定位导航 机器人伦理学 空间传感器应用 老年人陪护 4、可以拓展的科研方向 智能控制和自动化 ◆Intelligent control (智能控制) ◆Adaptive control (自适应控制) ◆Fuzzy control (模糊控制) ◆H∞ control (H∞ 控制) ◆Motion control (运动控制) ◆Nonlinear control (非线性控制) ◆Chaos control (混沌控制) ◆Robust control (鲁棒控制) ◆Hybrid system (混合系统) ◆Fault Tolerant control (容错控制) ◆Learning control (学习控制) ◆Variable control (可变控制) ◆Identification (辨识) ◆CIMS (计算机集成制造) 人工智能 ◆Behavior based robotics (基于行为的机器人学) ◆Intelligent architecture (智能结构) ◆Agent (智能体) ◆Artificial life (人工生命) ◆Neural networks (神经网络) ◆Genetic algorithm (遗传算法) ◆Evolutionary computing (进化计算) ◆Hybrid systems (混合系统) ◆Cognition (认知) ◆Biological intelligence (生物智能) ◆Symbolic system (符号系统) ◆Artificial emotion (人工情感) ◆Machine Learning (机器学习) 机器人学 ◆Mobile Robot Navigation (移动机器人导航) ◆SLAM (同步定位和构图) ◆Bio-Robotics (生物机器人学) ◆Human Robot Interaction (人-机器人交互) ◆Mobile Robot Wheel Mechanisms (移动机器人轮式机构) ◆Agriculture and Off-Road Robotics (农业和越野机器人学) ◆3D Vision (3 维视觉) ◆Mobility and Manipulation (移动和操作) ◆Computer Aided Scheduling (计算机辅助调度) ◆Mechanism Design (机械设计) ◆Geometry Issues in Robotics (机器人学中的几何学) ◆Localization (定位) ◆Haptic Interface(触觉接口) ◆Omnidirectional Vehicles (全向车) ◆Omnidirectional Vision (全景视觉) ◆Distributed Robotic Systems (分布式机器人系统) ◆Diagnostics and Networked Manufacturing Systems(诊断和网络制造系统) ◆Actuators and Drivers (执行器和驱动器) ◆Computational Intelligence (计算智能) ◆Vision-Based Navigation (基于视觉的导航) ◆Multi-mobile Robot System (多移动机器人系统) ◆Adaptive Control (自适应控制) 机器人在教学领域的应用
机械结构设计 1、机体规格与材料:身高约 58 cm,重约 4.3 kg, 机体材料为工程塑料。 2、充电器为AC 90-230 V/DC 24 V,电池能量持续时间约 90 min 3、需要具有25个自由度(DOF): 其中头部2个DOF,手臂5个DOF (每只手臂),胯部1个DOF,腿部5个DOF (每条腿),手部1个DOF;有三个手爪(每只手)。 4、2个扬声器,4个扩音器,2个CMOS数码摄像头,8个脚底压力传感器(每只脚各四个),1个双轴陀螺仪、1个三轴加速器,2个碰撞器(每只脚各一个)、双通道超声波传感器,2个红外传感器,9个触觉传感器; 5、Network access 连接类型为Wi-fi (IEEE 802.11g),以太网,通过胸前的按钮可以获得机器人的无限网络地址。 6、致动器基于霍尔效果传感器(32个)、dsPICS 微控制器和MAXON空芯杯直流电机 7、控制器主板采用1.6 GHz Intel Atom; RAM: 1GB / 闪存: 2GB 8、操作系统:嵌入式 Linux (32 bit x86 ELF), 使用OpenEmbedded基础上加以适当调整的发行套件,编程语言:Choregraphe, C++, URBI, Python。 9、随机配备Bluetooth;学术(科研)版。 10、基础功能:拥有人脸识别能力、动态图像追踪能力、中文英文语言识别能力、传感器的数据采集功能、电机运动控制功能。 主处理器介绍(头部) 头部分布有四个同步麦克风(48 KHz, 16 bits) 2个扩音器:头部两边各1个(48Khz, 16 bits) 2个VGA Cmos 摄像头,频率达30FPS 身体结构介绍 1、电机 25 个电机, 达1.2 N.m 21 个Maxon 无芯电机 2、位置传感器: 36 个磁性旋转编码器 (分辨率:12 bits) 每个腿部关节 2 个传感器:1 个motor axis, 1 关节 3、每个关节都有电流传感器 4、20 个嵌入式微控制器: 18个DSPic 40MIPS / 16 Bits 1个ARM9 96MHz 1个Psoc 传感器介绍 包括红外测距、超声波探测、碰撞传感器、压力感测传感器、陀螺仪、重力加速度等100多个传感器。 图像处理系统介绍 两个CMOS摄像头,分辨率为640*480;快速可上下切换的摄像头使NAO能够看到自己的脚 语音处理系统介绍 机器人有四个麦克风,分布在前后左右,可以完成声音定位。同时会说23个国家的语言。 机器人特殊领域应用案例 1、导盲机器人、导聋机器人 2、自闭症******机器人 3、其他应用领域 物联网及智能家居领域应用 复杂环境路径探测和定位导航 机器人伦理学 空间传感器应用 老年人陪护 4、可以拓展的科研方向 智能控制和自动化 ◆Intelligent control (智能控制) ◆Adaptive control (自适应控制) ◆Fuzzy control (模糊控制) ◆H∞ control (H∞ 控制) ◆Motion control (运动控制) ◆Nonlinear control (非线性控制) ◆Chaos control (混沌控制) ◆Robust control (鲁棒控制) ◆Hybrid system (混合系统) ◆Fault Tolerant control (容错控制) ◆Learning control (学习控制) ◆Variable control (可变控制) ◆Identification (辨识) ◆CIMS (计算机集成制造) 人工智能 ◆Behavior based robotics (基于行为的机器人学) ◆Intelligent architecture (智能结构) ◆Agent (智能体) ◆Artificial life (人工生命) ◆Neural networks (神经网络) ◆Genetic algorithm (遗传算法) ◆Evolutionary computing (进化计算) ◆Hybrid systems (混合系统) ◆Cognition (认知) ◆Biological intelligence (生物智能) ◆Symbolic system (符号系统) ◆Artificial emotion (人工情感) ◆Machine Learning (机器学习) 机器人学 ◆Mobile Robot Navigation (移动机器人导航) ◆SLAM (同步定位和构图) ◆Bio-Robotics (生物机器人学) ◆Human Robot Interaction (人-机器人交互) ◆Mobile Robot Wheel Mechanisms (移动机器人轮式机构) ◆Agriculture and Off-Road Robotics (农业和越野机器人学) ◆3D Vision (3 维视觉) ◆Mobility and Manipulation (移动和操作) ◆Computer Aided Scheduling (计算机辅助调度) ◆Mechanism Design (机械设计) ◆Geometry Issues in Robotics (机器人学中的几何学) ◆Localization (定位) ◆Haptic Interface(触觉接口) ◆Omnidirectional Vehicles (全向车) ◆Omnidirectional Vision (全景视觉) ◆Distributed Robotic Systems (分布式机器人系统) ◆Diagnostics and Networked Manufacturing Systems(诊断和网络制造系统) ◆Actuators and Drivers (执行器和驱动器) ◆Computational Intelligence (计算智能) ◆Vision-Based Navigation (基于视觉的导航) ◆Multi-mobile Robot System (多移动机器人系统) ◆Adaptive Control (自适应控制) 机器人在教学领域的应用